General view of an interactive simulation with EPI/GEOMVIEW. JPG (125 KB)
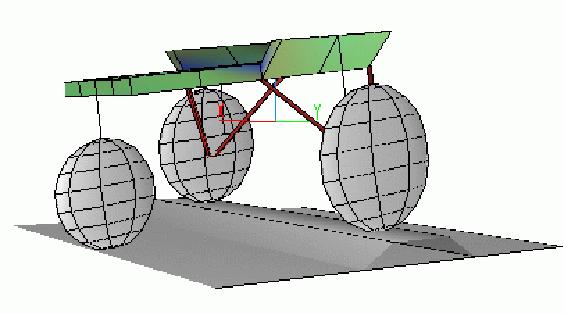
Vehicle with deformable chassis over an obstacle. JPG (26 KB)
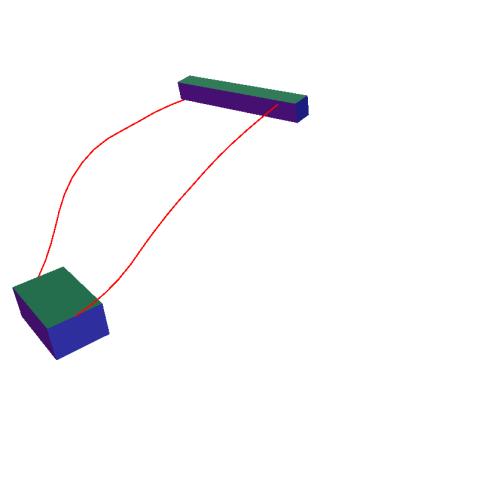
Swing. Each chain is composed by 15 rigid articulated links JPG (7.8 KB)
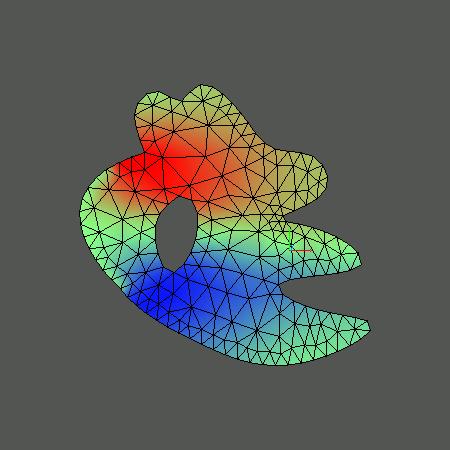
2D finite element analysis, stress contours. JPG (27 KB)
See more images of actual calculations performed by EPI for flexible multibody dynamics and in the context of
project MODRUMEF related to the robust analysis
of joints.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 Universidad Politécnica de Madrid
Universidad Politécnica de Madrid